
ケンブリッジコンサルタンツでは、 フィジカルAIをディープテックから実社会の価値創出へと進化させています。その中核をなすのが、人間とロボットのインタラクション(Human-Robot Interaction、以下「HRI」)です。
現在、ロボティクスの分野は大きな転換期を迎えています。現実世界で自律的に動作するAI、すなわち「フィジカルAI」への関心と投資が急速に高まっており、その勢いはとどまる気配がありません。ロボティクスはその応用分野の1つで、産業オートメーションや製造業、医療、家庭内サービスに至るまで、幅広い分野での応用が期待されており、フィジカルAIを搭載したロボットは、私たちの働き方や暮らし方に革新をもたらす可能性を秘めています。
フィジカルAIが理想形を模索する中で、汎用ロボットのプラットフォームとしてヒューマノイド・ロボットが注目を集めています。私たちの生活環境は人間の姿を前提に設計されているため、ヒューマノイド型の方がそうした空間での移動や操作が容易になります。こうした背景から、倉庫での人との協働作業から家庭での家事支援に至るまで、人とロボットとの関わりは今後の社会に不可欠なものとなっていくでしょう。
フィジカルAIがその真価を発揮し、実際に役立つ存在となるためには、単に動作するだけでなく、人間のニーズを理解する力が求められます。システムの機能そのものだけではなく、「人との関わりの質」が重要になります。HRIの統合による人間中心のインタラクションこそが、フィジカルAIを単なるツールから、「信頼できるチームメイト」へと進化させる鍵となるのです。人を支え、補完し、力を引き出す存在としての可能性が、今大きく広がっています。
人間とロボットの真の協働に向けたロードマップ
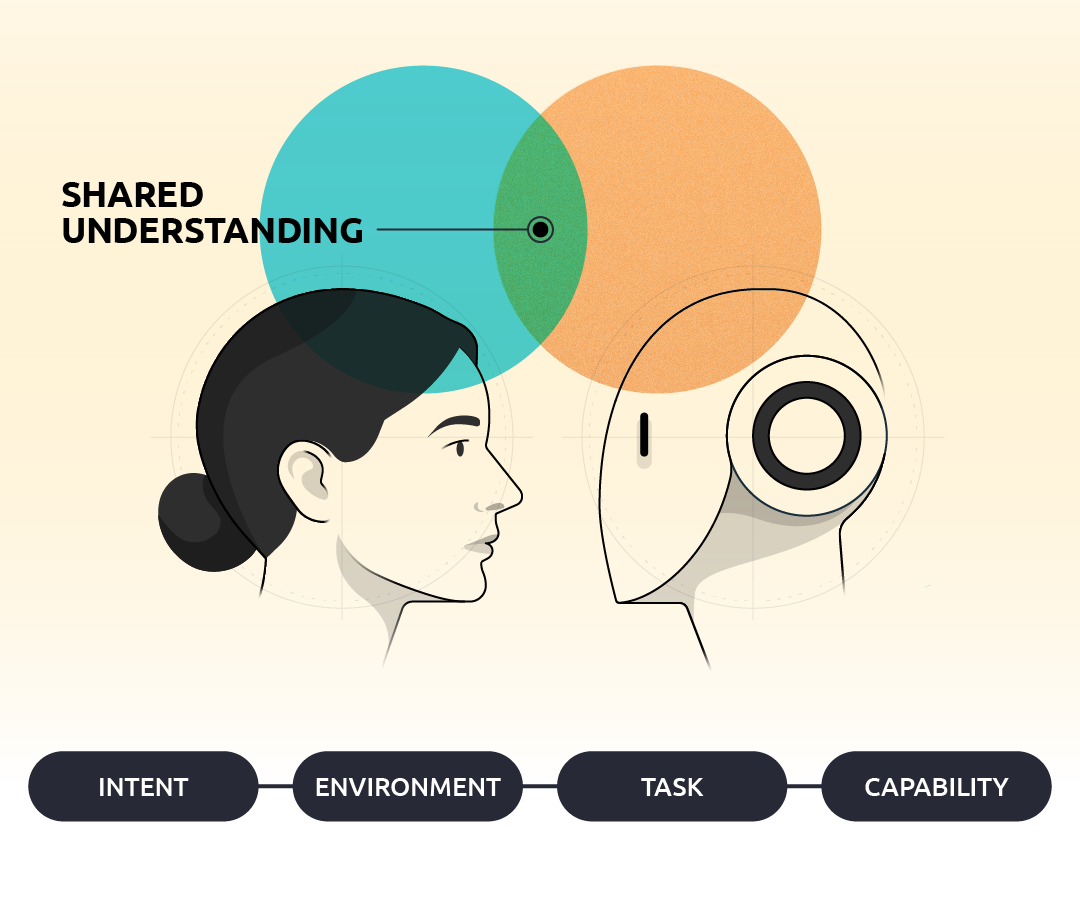
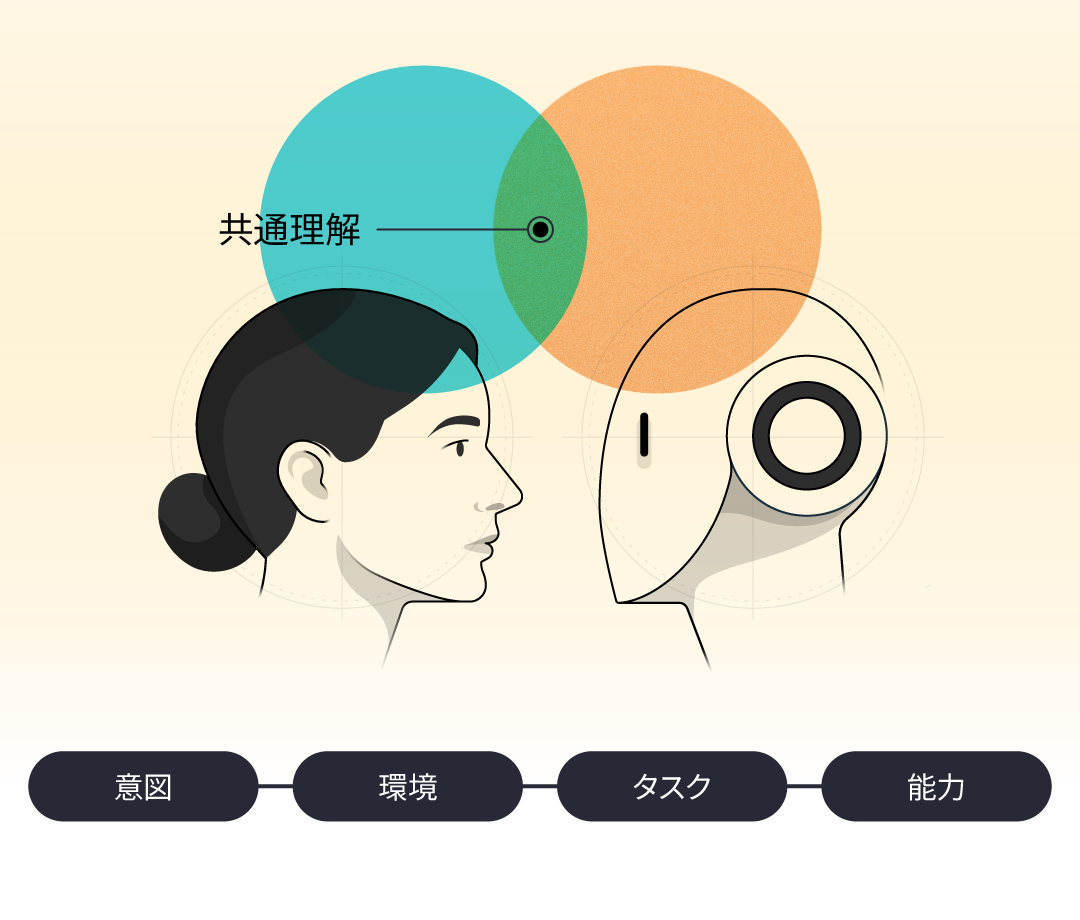
ロボットが優れたチームメイトとなるために必要な要素を理解するには、まず人間の優れたチームメイトの条件を考える必要があります。人と人との効果的な協働は、活動する状況において共有された行動のイメージ(メンタルモデル)と文脈の共通理解を基盤にして成り立っています。これには、次の4つの要素に対する共有認識が含まれます。
- 環境:この空間は何のためにあるのか?どんな物や道具があり、それらは何に使えるのか?
- タスク:私たちは何を達成しようとしていて、そのためにどんなステップが必要か?
- 能力:それぞれが何をできるのか?どこに限界があるのか?
- 意図:今あなたは何をしようとしていて、それは私の行動とどう関係しているのか?
このような基盤の共有がなければ、チームワークは非効率になり、信頼関係も築けません。逆に、これらを共有できれば、人とロボットの協働も自然でスムーズなものになります。
人間は、こうした共通理解を築く力を子どもの頃から自然に身につけ、日常のコミュニケーションで当たり前のように活用しています。ロボットが同じレベルに達するには、明確なHRIのロードマップが必要です。このロードマップは、段階的に高度さを増していく4つの主要なステージを経て進行します。
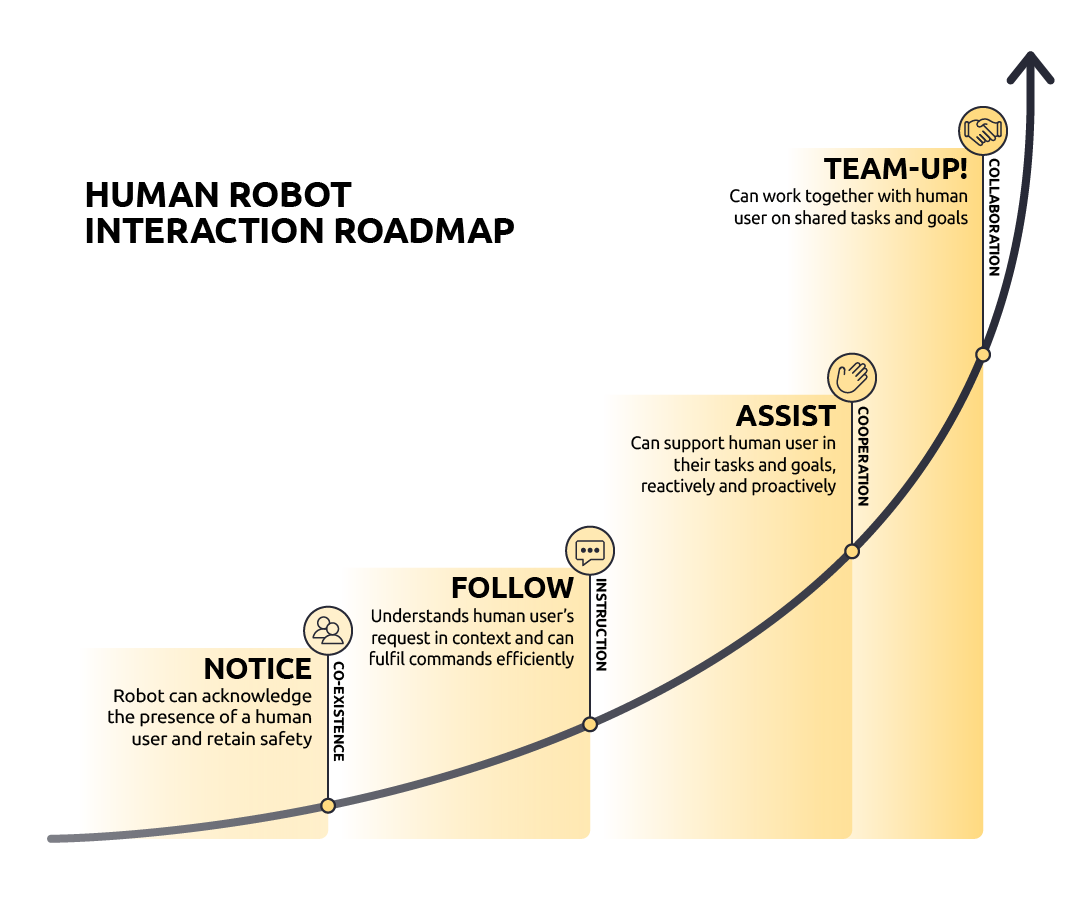
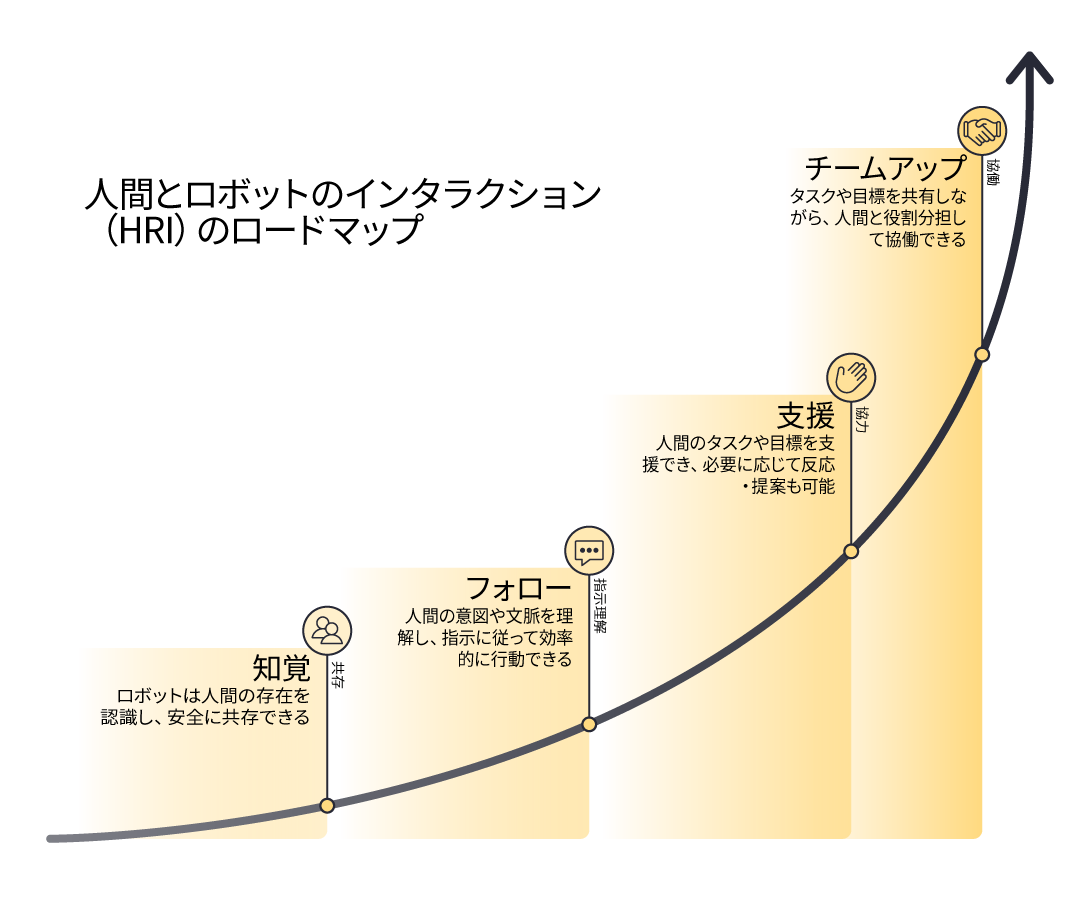
ステージ1:共存 ロボットが人間と同じ空間で、安全かつ効率的に、独立して動作できる基本段階です。たとえば倉庫では、ロボットが人間の存在を認識し、その動きを予測して、無駄な停止をせずに回避しながら安全に移動する必要があります。これは、現在主流の「人とロボットを物理的に分離する」産業用システムよりも、すでに一歩進んだアプローチです。
ステージ2:指示理解 この段階では、ロボットが人間の自然な指示を文脈を踏まえて理解できるようになります。定型的なGUIや定型化された口頭のコマンドに頼るのではなく、話し言葉と指差し、視線などの自然なジェスチャーを組み合わせて解釈します。たとえば単に「それを取って、あそこに置いて」と言うだけの指示でも、指差しなどの非言語的な合図とあわせて正しくタスクと状況を理解できるようになります。
ステージ3:協力 ロボットと人間が、同じ目標に向かって別々のタスクをこなしながら連携する段階です。ロボットは、人間が次の作業で必要とする道具を予測して先回りして用意するなど、自発的な支援が可能になります。
ステージ4:協働 人間とロボットが、目標とプロセスについて共通の理解を持ち、タスクを共有しながら一緒に作業する段階です。たとえば、工場で製品を一緒に組み立てたり、家庭で食器洗い機に食器を一緒に並べたりするような場面です。
これら4つのステージは、段階的に高度なインタラクションを構築していくものですが、すべてのロボットが最終的に「協働」に到達すること自体が目的ではありません。このロードマップは、状況に応じて選択可能なメニューを示すものです。HRIの真の価値は、多様なインタラクションのモードを柔軟に使い分け、タスクやユーザー、環境に応じて最適な関わり方を選択できるようにすることにあります。たとえば、倉庫で荷物を運ぶロボットには、安全性と効率のために人の存在を「認識」する能力があれば十分かもしれません。一方で、家庭内でのアシスタントには、タスクを「協力」してこなす力が求められるでしょう。重要なのは、文脈に応じた適切な能力を適切な場面で活用することにより、最適なパフォーマンスと信頼性を両立させることです。
このように文脈に応じて適切な対応をとることこそが、高度なHRIが難しい理由であり、価値を生むところでもあります。単にシーンを認識する高度なセンシング技術や、ロボットを動かす従来型の制御技術だけでは不十分です。HRIの本質的な目標は、人と機械の間に共通の理解を築くことにあります。これにより、システムは人の行動からその瞬間の意図を推測し、空間や目の前のタスクに応じたニーズを理解できるようになります。
こうした深い文脈理解に基づく知性が、ロボットを単に状況に反応する事前プログラム型のツールから、能動的に人を支援する協働パートナーへと進化させ、安全性・効率性・産業導入の新たなレベルを切り拓いていくのです。
当社が実践するHRIの最前線
当社のフィジカルAIチームは、このロードマップに沿って、技術の高度化を積極的に進めています。現在のシステムはすでに「フォロー」段階を超える性能を発揮しており、研究開発は次のステージである「チームアップ」に向けて進行中です。
公開中のデモでは、「フォロー」段階における自然な人とロボットのインタラクションをご覧いただけます。ユーザーや空間に追加のセンサーを設置することなく、ロボットに搭載されたカメラとマイクのみで実現しています。
このデモでは、ユーザーが定型的なコマンドを使う必要はなく、音声とジェスチャーといった自然な合図の組み合わせでロボットとやり取りできます。たとえば、ユーザーがコップを動かすよう指示し、2つ目のコップが登場すると、ロボットは状況の曖昧さを認識し、失敗しないよう明確化を求めます。ユーザーが指差しで曖昧さを解消すると、ロボットは指示を確認し、タスクを完了します。
これは、実行中のタスクにおけるユーザーの意図、環境、空間的制約に関する共有理解が成立していることを示す、シンプルながらも非常に示唆に富んだ事例です。同時に、高度なHRIを構築する上での課題も浮き彫りにしています。まず、認識精度がその基盤となります。どれほど高度な推論や制御システムであっても、知覚処理プロセスが貧弱であれば、機能は損なわれます。特に、動き回る人間を安定して認識することは、極めて難易度の高い課題です。
次に直面する、より高度で複雑な課題は、構造化されておらずあらかじめ定められていないインタラクションへの対応です。人間のチームメイトと接するように、ユーザーが自由に話しかけたりジェスチャーを交えたりしても、常に安全で安定性が高く信頼できる応答を保証するには、どうすればよいのでしょうか。この課題を解決するには、曖昧でマルチモーダルな人間の行動をリアルタイムで理解し、最適な対応を導き出すアーキテクチャが求められます。
人とロボットの協働に向けたロードマップの進化
ロボットとの現実的で汎用的な協働を実現するには、安定性の高いHRIの統合が不可欠です。これは、非構造的で自由な対話を可能にしながらも、安全性・信頼性・応答性を兼ね備えたインタラクションを、実環境で成立させることを意味します。
当社は、HRIロードマップの中核として、ハイブリッド型認知知能システムを構築しました。このシステムは、「感知 → 理解 → 支援」というシンプルかつ強力なフレームワークに基づいて設計されています。
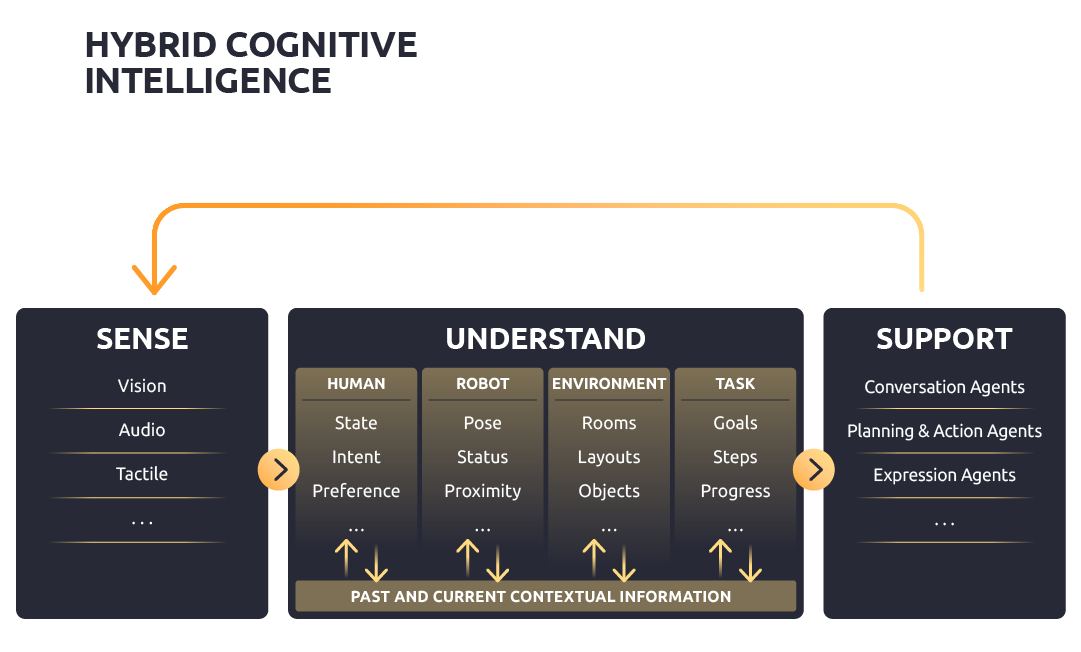
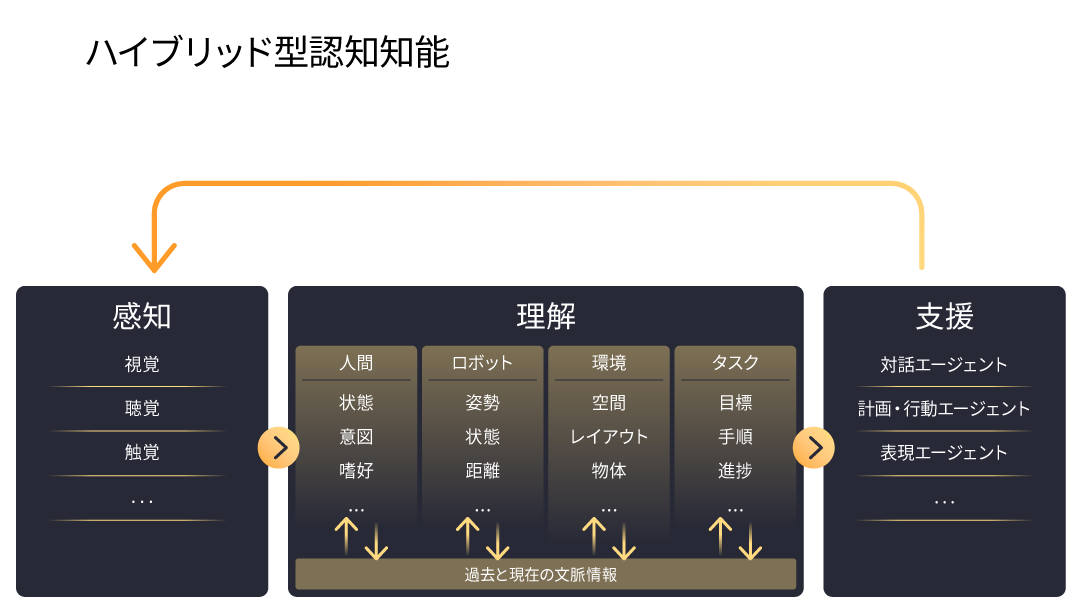
感知:システムは、環境からマルチモーダルなデータを継続的に収集することにより、人間のユーザー、ロボット、進行中のタスク、そして置かれている環境の現在の状態を把握します。
理解:このフェーズは、人間とロボットの間に共有された行動パターン(メンタルモデル)を構築する作業の中核となります。システムは、人間とロボットそれぞれの環境、タスク、目的と行動という4つの主要領域について、文脈に沿って詳細に理解します。そしてシステムは、こうして得られた文脈を、ナレッジグラフやオントロジーなどの構造化された知識ベースに保持します。
支援:構築された共通理解をもとに、複数のAIエージェントが連携して意思決定を行います。それぞれが操作、会話、計画、移動などの役割を持つ複数のエージェントが協働して、文脈情報を活用しながら、ユーザーを最適に支援するためのロボット制御を実行します。
このアーキテクチャは、キャップジェミニとの Human-Machine Understandingについての共同レポート でも詳しく紹介されています。高度なモデリング技術とエージェント型AIを組み合わせることで、システムは環境や目の前のタスク、関与する人間とロボットを的確に把握します。さらに、構造化された知識ベースを活用し、インタラクション全体にわたって重要な文脈情報を一貫して保持します。
文脈を明確かつ体系的に管理することで、AIモデル、意思決定エージェント、センサーの連携がより効果的に行われ、目の前のタスクの全体像を正確に把握できるようになります。この構造により、システムの判断プロセスには透明性・安定性・信頼性が備わり、どの情報に基づいて意思決定が行われたのかを明確に示すことが可能になります。
チームに新しいメンバーを迎える準備はできていますか?
フィジカルAIの進化には、HRIの進化が欠かせません。当社のロードマップに沿って、共存・指示理解・協力・協働ができるようなロボットを開発することにより、製造業から医療分野に至るまで、あらゆる業界の働き方が再定義されることになるでしょう。
今、問われているのは「ロボットがチームに加われるか」ではなく、「私たちがロボットをチームに迎える準備ができているかどうか」です。単なるツールを作っているのか、それともチームメイトを育てているのか、自問してみてください。
ケンブリッジコンサルタンツは、HRIとフィジカルAIの未来を探求し続けています。ぜひ、私たちの取り組みにご注目ください。
専門家

アリ シャフティ
AI、心理学、認知科学、行動科学の専門家チームを率いて、動的で厳しい環境においてユーザーを理解し支援できる次世代のシステムの構築に携わっている。ロボット工学の博士号を有し、人間とロボットの相互作用が専門。人間と機械の相互作用に関する研究開発で10年以上の経験を持つ。


